Thursday 12 Jun 2025
08:30
Registration
09:00
Welcome
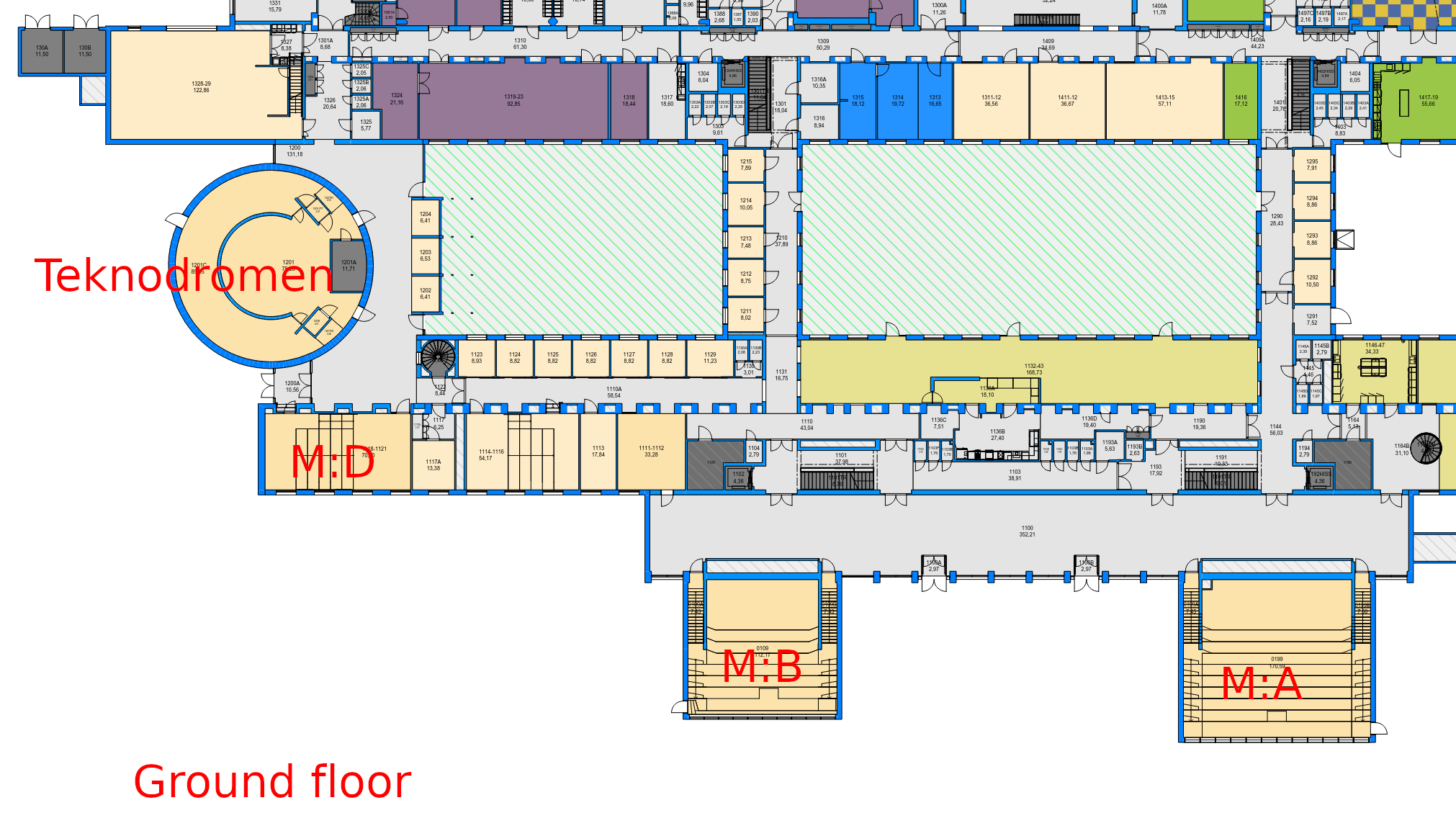
M:A
09:10
Plenary – Deliver the Benefits of Self-Driving Technology Safely, Quickly, and Broadly.
Erik Möllerstedt, AuroraM:A
Chair: Bo Bernhardsson
Aurora Innovation is a self-driving vehicle technology company based in Pittsburgh, Pennsylvania, on the brink of launching a self-driving truck service in Texas, USA. The core of the technology is the Aurora Driver, a continuously improving, intelligent autonomous driving system, designed to see, understand, and safely traverse the world around it. During the talk Erik will introduce Aurora, and give an overview of the Aurora Driver. He will also talk about his work on motion control, and discuss some challenges controlling an 80,000 lbs truck on the freeway.

09:55
Coffee
10:20
Session 1 Optimal and Predictive Control
Chair: Richard PatesM:D
- 10:20 – 10:40 Explicit Solutions to the Bellman Equation for Semilinear Systems: David Ohlin, Richard Pates, Murat Arcak
- 10:40 – 11:00 Automatic Portfolio Management framework using a Linear Quadratic Gaussian control law: Stéphane Sallé
- 11:00 – 11:20 Symmetrizable systems: Hamed Taghavian, Jens Sjölund
- 11:20 – 11:40 Revisiting Dynamic Programming for Exploration: Insights from a Simple Dual Control Problem: Ying Wang, Kevin Colin, Yue Ju, Mirko Pasquini, Håkan Hjalmarsson
- 11:40 – 12:00 A Unified Framework for the Analysis and Design of Online Feedback Optimization Controllers: Giuseppe Belgioioso
Session 2 Machine Learning
Chair: Fabio BonassiM:B
- 10:20 – 10:40 Robust Linear Quadratic Reinforcement Learning: Ludvig Svedlund, Bengt Lennartsson
- 10:40 – 11:00 A Network Perspective on Gradient Flow Equations for Deep Linear Neural Networks: Joel Wendin, Claudio Altafini
- 11:00 – 11:20 A Metropolis-Adjusted Langevin Algorithm for Sampling Jeffreys Prior: Yibo Shi, Braghadeesh Lakshminarayanan, Christian R. Rojas
- 11:20 – 11:40 Sparse Estimation of Inverse Covariance and Partial Correlation Matrices via Joint Partial Regression: Samuel Erickson, Tobias Rydén
- 11:40 – 12:00 From system identification to sequence models: a primer on Structured State-Space Models: Fabio Bonassi, Per Mattsson, Thomas Schön
Session 3 Safety-Critical and Secure Control
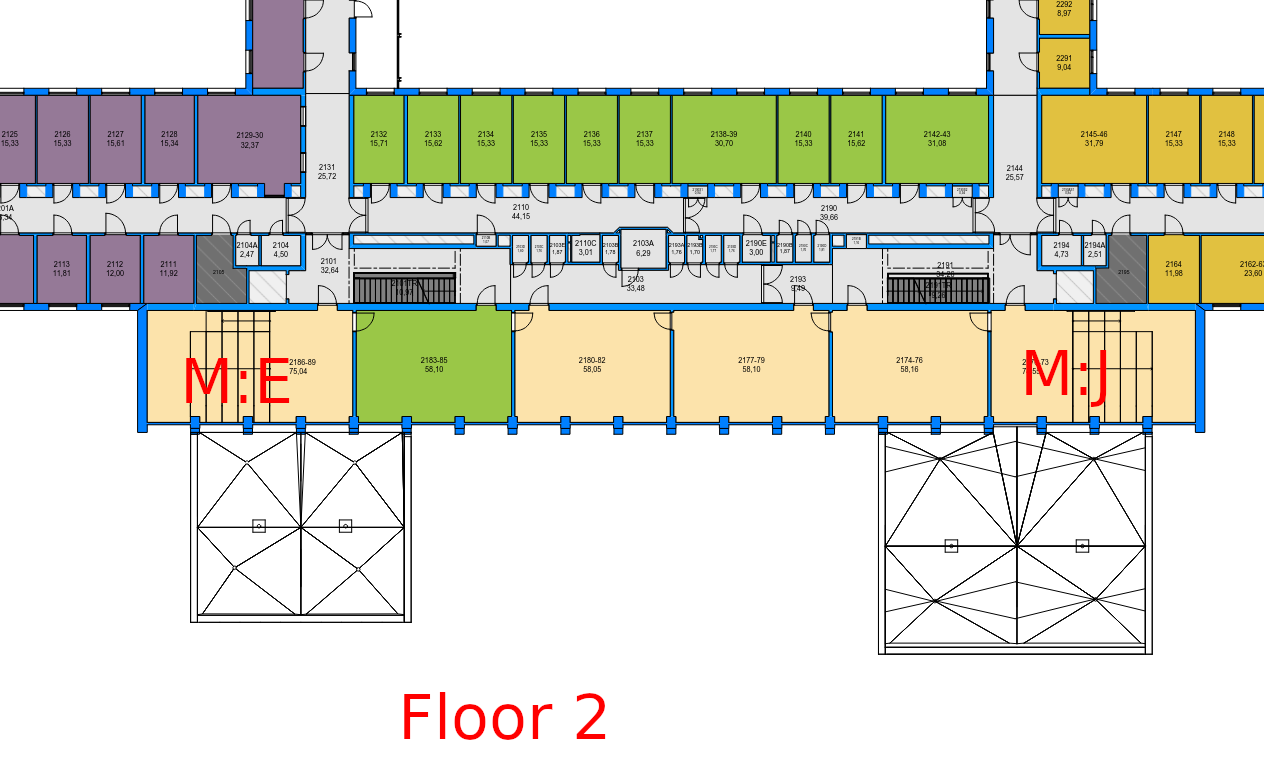
Chair: Andre TeixeiraM:E
- 10:20 – 10:40 On Resilience Guarantees by Finite-Time Robust Control Barrier Functions: Kamil Hassan, Daníel Selvaratnam, Henrik Sandberg
- 10:40 – 11:00 Security analysis of control systems under nonlinear attacks: Ruslan Seifullaev, André Teixeira
- 11:00 – 11:20 Toward Encrypted Anomaly Detection with Minimal Privacy Leakage Using Functional Encryption: Junsoo Kim, Changee Hahn, Rijad Alisic
- 11:20 – 11:40 Dissipative Barrier Feedback for Control of Safety-Critical Systems: Theory and Application: Zhiqi Tang, Xiao Chen, Karl H. Johansson, Jonas Mårtensson
- 11:40 – 12:00 Data-Driven and Stealthy Deactivation of Safety Filters: Daniel Arnström, André Teixeira
Session 4 Navigation and Localization Technologies
Chair: Bo BernhardssonM:J
- 10:20 – 10:40 Investigating Multi-Agent Terrain-Aided Navigation: Eric Sevonius, Fredrik Gustafsson, Gustaf Hendeby
- 10:40 – 11:00 Performance Analysis of Communication Signals for Localization in Underwater Sensor Networks: Ashwani Koul, Gustaf Hendeby, Isaac Skog
- 11:00 – 11:20 Automatically Landing a Helicopter on a Moving Ship: Ola Härkegård
- 11:20 – 11:40 Motion Planning in Non-Convex Corridors: A Guided MPC Approach: Bernhard Wullt, Per Mattsson, Thomas B. Schön, Mikael Norrlöf
- 11:40 – 12:00 Low-Complexity Control for Handling Generalized Time-Varying Output Constraints in Uncertain MIMO Nonlinear Systems: Farhad Mehdifar, Lars Lindemann, Charalampos P. Bechlioulis, Dimos Dimarogonas
12:00
13:30
Poster Session
- Health-Aware Control for Optimized Production and Maintenance: A Unified Framework – Amirhossein Hosseinzadeh Dadash
- Communication and Control Co-Design for Risk-Aware Safety of Mobile Robots with Offloaded Localization – Adam Miksits, Fernando S. Barbosa, Jose Araujo, Karl Henrik Johansson
- Weighted Null Space Fitting (WNSF) – A Link between The Prediction Error Method and Subspace Identification – Jiabao He, Håkan Hjalmarsson
- Free-Spacing Circular Motion of Vehicles in Cyclic Pursuit – Zhaozhan Yao, Yuhua Yao, Xiaoming Hu
- Unknown Input Observers Breaking Confidentiality of Controller States – Enno Breukelman, Henrik Sandberg
- H2 and H-infinity Optimal Control of Mass-Spring Systems – Johan Lindberg
- A Sparse Implementation of an LQ Regulator using Back-Substitution – Julia Adlercreutz
- Leader selection and control design for topology estimation of dynamical networks – Nana Wang, Dimos Dimarogonas
- Fine Tuning a Data-Driven Estimator – Braghadeesh Lakshminarayanan, Christian R. Rojas
- MPC Feed-Forward for Constraint Handling – Frida Norlund, Rasmus Tammia
- Detecting Feedback-path Delay Injection Attacks Using Interacting Multiple Model Filtering – Lovisa Eriksson, Torbjörn Wigren, Dave Zachariah, André Teixeira
- Linear Regulator-based synchronization of positive discrete-time multi-agent systems – Alba Gurpegui, Mark Jeeninga, Emma Tegling, Anders Rantzer
- Decentralized Offloading Decision-Making of Control Computations – Emil Sundström
- Secure Filtering against Spatio-Temporal False Data Attacks under Asynchronous Sampling – Tung Nguyen, André Teixeira
- Scaled Relative Graphs of Data-Driven Systems – Talitha Nauta
- Katz Centrality-based Security in Large-Scale Networks – Tung Nguyen, Sribalaji C. Anand, André Teixeira
- Controllability Analysis of Multi-Modal Acoustic Particle Manipulation in One-Dimensional Standing Waves – Dongjun Wu, Guilherme Perticarari, Thierry Baasch
- Nonlinear Identification via Adaptive Input Design under State Constraints – Jingwei Hu, Dave Zachariah, Torbjörn Wigren, Petre Stoica
- An odd behaviour of the particle filter – Jakob Åslund, Fredrik Gustafsson, Gustaf Hendeby
- Anomaly Detection for Reaction Wheel Assemblies in Satellites – Alejandro Penacho Riveiros, Nicola Bastianello, Matthieu Barreau, Karl H. Johansson
- Robust Federated Learning with Multi-Step Aggregation – Abbas Pasdar, Changxin Liu, Nicola Bastianello
- Remote Laboratory for Training in Safety Controller Applications – Volodymyr Voytenko, Alexander Pisarevskiy
- Learning Optimal Queue Dispatch Policies – Fethi Bencherki, Anders Rantzer
- Designing Monotone Operator Splitting Algorithms with Steering Vectors – Max Nilsson, Sebastian Banert, Pontus Giselsson
- Using Heterogeneous Control Strategies to Achieve Length-Independent Behavior in Platoons – Ask Hällström, Richard Pates
- Online Estimation and Control of Soil Forces in Autonomous Cultivation – Viktor Uvesten, Martin Enqvist
- Using arm-side position measurements and hysteresis model in robot identification – Stefanie Zimmermann
- Splitting the Forward-Backward operator – a full characterization – Anton Åkerman, Enis Chenchene, Pontus Giselsson, Emanuele Naldi
- Hand-arm coordination for robot interaction tasks – Marko Guberina, Björn Olofsson, Yiannis Karayiannidis
14:30
Coffee
15:00
Session 5 Data-Driven Control and Identification
Chair: Angela FontanM:B
- 15:00 – 15:20 Modified Adaptive Data-Enabled Policy Optimization Control to Resolve State Perturbations: Mojtaba Kaheni, Niklas Persson, Vittorio De Luliis, Constanzo Manes, Alessandro Papadopoulos
- 15:20 – 15:40 Estimating the Phase Content of Graphite Electrodes from the Electrode Potential: Isac Borghed, Xiaolei Bian, Torsten Wik
- 15:40 – 16:00 Robust Data-Driven Tube-Based Zonotopic Predictive Control with Closed-Loop Guarantees: Mahsa Farjadnia, Angela Fontan, Amr Alanwar, Marco Molinari, Karl Henrik Johansson
- 16:00 – 16:20 Data-Driven Estimation of Structured Singular Values: Margarita A. Guerrero, Braghadeesh Laksiminarayanan, Christian R. Rojas
- 16:20 – 16:40 Bayes and Biased Estimators Without Hyper-Parameter Estimation: Comparable Performance to the Empirical-Bayes-Based Regularized Estimator: Yue Ju, Bo Wahlberg, Håkan Hjalmarsson
Session 6 Advances in Optimization and Game Theoretic Control
Chair: Manu UpadhyayaM:D
- 15:00 – 15:20 Explicit receding-horizon dynamic games: Emilio Benenati, Giuseppe Belgioioso
- 15:20 – 15:40 Receding Horizon Games for Dynamic Resource Allocation Problems: Sophie Hall, Giuseppe Belgioioso, Florian Dörfler, Dominic Liao-McPherson
- 15:40 – 16:00 Mobile Network Control with a World Model: Maxime Bouton, Ioanna Mitsioni, Jaeseong Jeong, Alessandro Previti
- 16:00 – 16:20 AutoLyap: A Python package for computer-assisted Lyapunov analyses for first-order methods: Manu Upadhyaya, Adrien B. Taylor, Sebastian Banert, Pontus Giselsson
- 16:20 – 16:40 PX4Space and ATMOS: Towards Open-source, Replicable Space Robotics: Pedro Roque, Sujet Phodapol, Elias Krantz, Jaeyoung Lim, Joris Verhagen, Frank J. Jiang, David Dörner, Huina Mao, Gunnar Tibert, Roland Siegwart, Ivan Stenius, Jana Tumova, Christer Fuglesang, Dimos V. Dimarogonas
Session 7 Robotics, Motion, and Autonomous Systems
Chair: Johan LöfbergM:E
- 15:00 – 15:20 Uncertainty-Responsive Safe MPC for Autonomous Driving in Dynamic Environments: Ying Shuai Quan, Paolo Falcone, Jonas Sjöberg
- 15:20 – 15:40 Cancelled! Task-space path-velocity control for torque-limited redundant manipulators: Zheng Jia, Yiannis Karayiannidis, Björn Olofsson
- 15:40 -16:00 Optimized and kinematically feasible multi-agent motion planning: Anja Hellander, Kristoffer Bergman, Daniel Axehill
- 16:00 – 16:20 Path planning with moving obstacles using stochastic optimal control: Seyyed Reza Jafari, Anders Hansson, Bo Wahlberg
- 16:20 – 16:40 Switched Control Barrier Functions-based Safe Docking Control Strategy for a Planar Floating Platform: Akshit Saradaghi, Viswa Narayanan Sankaranarayanan, Avijit Banerjee, Sumeet Satpute, George Nikolakopoulos
Session 8 Multi-agent and Networked Systems
Chair: Claudio AltafiniM:J
- 15:00 – 15:20 Multipolar dynamics of social segregation: Data validation on Swedish vaccination statistics: Luka Bakovic, David Ohlin, Emma Tegling
- 15:20 – 15:40 Opinion optimization and the wisdom of crowds in social networks: Ye Tian
- 15:40 – 16:00 On Word-of-Mouth and Private-Prior Sequential Social Learning: Andrea Da Col, Cristian Rojas, Vikram Krishnamurthy
- 16:00 – 16:20 Wisdom of crowds in signed DeGroot models: Muhammad Ahsan Razaq, Claudio Altafini
- 16:20 – 16:40 Combining homophily in interaction and opinion spaces: A bounded confidence approach: Yangyang Luan, Camilla Ancona, Carmela Bernardo, Valentina Pansanella, Francesco Lo Iudice, Giulio Rossetti, Francesco Vasca, Xiaoqun Wu, Claudio Altafini
18:00
Friday 13 Jun 2025
08:50
Plenary – Naval autonomy in one of the world’s most complex environments
Per Skarin and Mårten Lager, Saab KockumsM:A
Chair: Karl-Erik Årzén
Sweden has an extensive and complex coastline, more rich with islands than any other country. Managing this complex naval environment in order to keep people and societies safe, it is imperative to retain up to date, cutting edge technology. Saab Kockums is a world-leading provider of advanced naval systems and solutions, perhaps best known for its highly advanced submarines. The company also develops cutting edge surface warships, patrol boats, and smaller underwater systems for defense and scientific exploration. Saab Kockums recently announced its foundation for naval intelligence: the Autonomous Ocean Core, showcased in a real-time demonstration of the Enforcer 3 at Euronaval. Saab’s vision is to empower autonomy in a range of naval platforms, for military and civilian missions. Through representatives from Kockums Research and Technology, this talk will be about ongoing activities in and around Saab’s effort to level up maritime autonomy. We will frame the problems of perception, planning and control in the naval domain, present research and challenges for the future, and take a look at platforms such as the Enforcer 3.

09:35
Coffee
10:00
Session 9 Estimation and Filtering Techniques
Chair: Henrik SandbergM:B
- 10:00 – 10:20 Using principal component regression to reconstruct historical stock prices: Stéphane Sallé
- 10:20 – 10:40 Water Distribution Leakage Localization and One-Way Pipes: Victor Molnö, Henrik Sandberg
- 10:40 – 11:00 Measurement-Efficient Dynamics Change Detection in On-Off Models for Dynamic Spectrum Access: Simon Lindståhl, Alexandre Proutiere, Andreas Johnsson
- 11:00 – 11:20 A Distributed Kalman-like Observer with Dynamic Inversion-Based Correction for Multi-Agent Estimation: Nicola De Carli, Dimos Dimarogonas
- 11:20 – 11:40 Sensor-Based Estimation of Contaminant Flow in Water Networks via Entropic Optimal Transport: Michele Mascherpa, Victor Molnö, Carsten Skovmose Kallesö, Johan Karlsson
Session 10 Biomedical and other Applications
Chair: Bo BernhardssonM:D
- 10:00 – 10:20 Mixed Integer Linear Programming for Active Contact Selection in Deep Brain Stimulation: Anna Franziska Frigge, Alexander Medvedev
- 10:20 – 10:40 The Auditory Pathway from Brainstem to Cortex in one Simultaneously Recorded EEG-MEG Dataset: Johanna Wilroth, Vrishab Commuri, Charlie Fisher, Karl D. Lerud, Jonathan Z. Simon, Martin Enqvist
- 10:40 – 11:00 Pulse-modulated feedback control in dosing applications: Alexander Medvedev
- 11:00 – 11:20 Modelling and Control for Hybrid Cooling of Lithium-ion Batteries: Godwin K. Peprah, Yicun Huang, Torsten Wik, Changfu Zou, Faisal Altaf
- 11:20 – 11:40 Distributed Model Predictive Controller for Thermal Energy Management System of Battery Electric Vehicles: Prashant Iokur, Nicolce Murgovski, Kristian Nicklasson
Session 11 Cyber-Physical and Real-Time Systems
Chair: Karl-Erik ÅrzénM:E
- 10:00 – 10:20 Stability-Guaranteed Defence Mechanism for Detecting Integrity Attacks on Cyber-Physical Systems: Mojtaba Kaheni, Vittorio De Iuliis, Costanzo Manes, Alessandro Papadopoulos
- 10:20 – 10:40 Analysis of Control Systems under Sensor Timing Misalignments: Yde Sinnema, Martina Maggio
- 10:40 – 11:00 Simplifying Control Validation with Modular Physical Models in Simscape: Carlos de Cos
- 11:00 – 11:20 Offloading of Time-Optimal Motion Planning with Jerk Constraints: Ahmed Al Bayati, Philip Olhager, Björn Olofsson, Karl-Erik Årzén
Session 12 Networked Control and other Topics
Chair: Emma TeglingM:J
- 10:00 – 10:20 Optimal disturbance decoupling algorithms over networks: Luca Claude Gino Lebon, Claudio Altafini
- 10:20 – 10:40 Compositional design for time-varying and nonlinear coordination: Jonas Hansson, Emma Tegling
- 10:40 – 11:00 Stability of Open Multi-agent Systems over Dynamic Signed Graphs: Pelin Sekercioglu, Angela Fontan, Dimos Dimarogonas
- 11:00 – 11:20 Mixtures of ensembles: System separation and identification via optimal transport: Filip Elvander, Isabel Haasler,
- 11:20 – 11:40 On the need of advanced applied courses in automatic control for the Swedish process industry and how to meet it: Andre Yamashita, Johan Simonsson, Tomas Eriksson
12:00
13:15
Poster Session
- Fundamental limitation of IIG gain for fault detection in LTI systems – Jingwei Dong, André Teixeira
- Distributed Kalman Filtering using a Common Prior – Felix Gustafsson, Roland Hostettler, Subhrakanti Dey
- On the Use of Parallel Computing for Exact Complexity Certification of Quadratic Programming Algorithms – Joel Wikner, Daniel Arnström, Daniel Axehill
- Closed-Loop Neural Operator-Based Observer of Traffic Density – Alice Harting, Karl H. Johansson, Matthieu Barreau
- Neural Stimulation Reconstruction from EEG using Fractional-Order Networks towards Predictive Model Validation in Clinical Applications – Alessandro Varalda, Sergio Péquito
- Learning to optimize with convergence guarantees – Andrea Martin
- Safe Output Feedback Improvement with Baselines – Yibo Wang, Ruoqi Zhang, Per Mattsson
- Combining regulatory control and online optimization through phasor-based extremum seeking control – Johan Lindqvist, Andreas Johansson, Khalid Atta, Derik Leroux
- Distributed Learning of Gaussian Process Augmented State-Space Models – Sebastian Karlsson, Gustaf Hendeby, Isaac Skog
- Classification of multivariate signals using Riemannian geometry and the Hilbert transform – Martin Gemborn Nilsson, Bo Bernhardsson
- Estimation and Prediction for Advanced Situational Awareness – Louise Lennartsson, Zoran Sjanic, Gustaf Hendeby
- Adaptive Incentive Design with Minimized Regret – Georgios Vasileiou, Lantian Zhang, Silun Zhang
- On Accessibility Fairness in Intermodal Autonomous Mobility-on-Demand Systems – Sara Betancur Giraldo, Mauro Salazar, Fabio Paparella, Leonardo Pedroso
- Trajectory Planning and Control for Cooperative Manipulators in Constrained Environments – Mayank Sewlia, Christos Verginis, Dimos Dimarogonas
- Oversampling-Based Control with Implementations – Max Nyberg Carlsson
- Encrypted Linear Regression using CKKS – Roberto Carboni, Roland Hostetter, Anders Ahlén, Subhrakanti Dey
- Conformal Data-driven Control of Stochastic Multi-Agent Systems under Collaborative Signal Temporal Logic Specifications – Eleftherios Vlahakis, Lars Lindemann, Dimos Dimarogonas
- Inverse Inference on Cooperative Control of Networked Dynamical Systems – Yushan Li, Jianping He, Dimos Dimarogonas
- Personalized Probabilistic Load Forecasting using Gaussian Processes – Johannes Ridefelt, Roland Hostetter
- Simulation Analysis of Potential Lifetime Extension Through Dynamic Battery Reconfiguration – Albert Skegro, Torsten Wik, Changfu Zou
- EV charging: an optimal control approach via PMP – Lorenzo Montalto, Nikolce Murgovski, Jonas Fredriksson
- Byzantine-Robust Federated Learning with Learnable Aggregation Weights – Javad Parsa, Amir Daghestani, André Teixeira, Mikael Johansson
- Controller Design of a Self-Driving Bike – Qianlei Jia, Sarah Stoiber, Jonas Sjöberg
- On calibration of ADM1 model parameters to modified AMOCO model – Bethlehem Abera, Torsten Wik
- Efficient comparison and sorting under encryption for anti-money laundering protocols – Pranav Varna, Roland Hostettler
- Safe Interactive Motion Planning with Learning-based Distributionally Robust Optimal Control – Erik Börve, Nikolce Murgovski, Morteza Haghir Chechreghani, Leo Laine
- Robust Model Predictive Control for Fast Discharging of Retired Lithium-ion Battery Cells – Meng Yuan, Adam Burman, Changfu Zou
- Nonlinear Online Optimization for Vehicle-Home-Grid Integration including Household Load Prediction and Battery Degradation – Francesco Popolizio, Torsten Wik, Chih Feng Lee, Changfu Zou
- Predicting Electric Vehicle Energy Consumption from Field Data Using Machine Learning – Qingbo Zhu, Yicun Huang, Chih Feng Lee, Peng Liu, Jingwei Zhang, Torsten Wik
- Set-Invariance Methods for Spatiotemporally Constrained Systems – Adrian Wiltz, Dimos V. Dimarogonas
14:15
Plenary – Learning for Complex Control Systems – Guarantees, Performance & Computation
Melanie Zeilinger, ETH ZürichM:A
Chair: Anders Rantzer
Advancing autonomous systems requires not only improving the control of complex dynamical systems, but also achieving complex tasks in challenging environments. Learning has emerged as a promising means to practically address these challenges; however, the recovery of guarantees, particularly concerning safety, is often still lacking.
This talk will highlight our results towards addressing this problem by building on a constrained optimal control paradigm. I will begin by defining our notion of safety and how it can be effectively formulated as a planning problem. The talk will then address concepts of learning dynamics, objective functions, and constraint functions, which require a careful tradeoff between achievable guarantees and performance, while managing computational efficiency. The results in this presentation will be illustrated with applications from autonomous racing and robotics.

15:00
Bye bye + brownbag